Asynchronní motor je točivý elektrický stroj (elektromotor), pracující na střídavý proud. Je to nejrozšířenější pohon v elektrotechnice vůbec. Tok energie mezi hlavními částmi motoru (stator a rotor) je realizován výhradně pomocí elektromagnetické indukce, proto se často tento motor označuje jako motor indukční. Výhodou asynchronního motoru je vysoká spolehlivost, jednoduchá konstrukce a napájení z běžné střídavé sítě. Napájecí napětí může být jednofázové nebo trojfázové. Trojfázové je výrazně používanější. Asynchronní motor vynalezl Nikola Tesla.
1. Asynchronní motor trojfázový
1. Asynchronní motor trojfázový
je točivý elektrický stroj (elektromotor), pracující na střídavý proud. Je to nejrozšířenější pohon v elektrotechnice vůbec. Tok energie mezi hlavními částmi motoru (stator a rotor) je realizován výhradně pomocí elektromagnetické indukce, proto se často tento motor označuje jako motor indukční. Výhodou asynchronního motoru je vysoká spolehlivost, jednoduchá konstrukce a napájení z běžné střídavé sítě. Napájecí napětí může být jednofázové nebo trojfázové. Trojfázové je výrazně používanější. Asynchronní motor vynalezl Nikola Tesla.
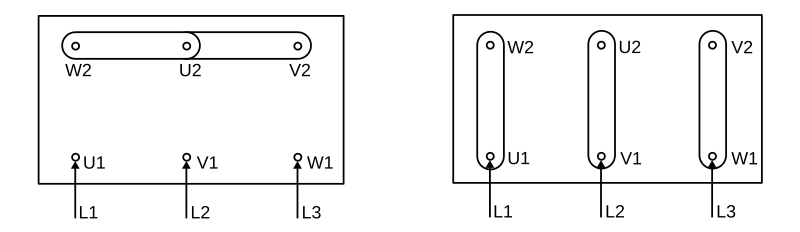
Svorkovnice asynchronního motoru zapojená do hvězdy a do trojúhelníka
2. Konstrukce trofázového motoru
Každý trojfázový asynchronní motor je složen ze dvou hlavních částí:
- Stator (pevná část) - je u většiny typů prakticky stejný. Je složen z nosné kostry motoru, svazku statorových plechů a statorového vinutí.
- Rotor (pohyblivá část) - hřídel s nalisovanými rotorovými (elektrotechnickými) plechy s drážkami, do kterých se vkládají měděné tyče, které jsou na obou stranách spojeny mosaznými kruhy. Takto upravený rotor se nazývá kotva nakrátko nebo kotva klecová.
- Kotva nakrátko - v drážkách rotoru jsou nalisovány neizolované měděné, mosazné nebo hliníkové tyče, které jsou na obou koncích spojeny zkratovacími kroužky. Tyče spolu s kroužky mají podobu klece (klecový rotor).
- Kroužková kotva - na hřídeli jsou kromě svazku rotorových plechů i sběrné kroužky. V drážkách plechů je uloženo trojfázové vinutí rotoru z izolovaných vodičů, které je zapojeno většinou do hvězdy, zřídka do trojúhelníka. Na tři sběrací kroužky je připojeno vinutí rotoru, ke kterým lze připojit činné odpory sloužící k rozběhu motoru.
3. Princip činnosti
Základem činnosti asynchronního motoru je vytvoření točivého magnetického pole, které vznikne průchodem střídavého trojfázového proudu vinutím statoru. Toto magnetické pole indukuje v rotoru napětí a vzniklý proud vyvolává sílu otáčející rotorem.
Otáčky točivého pole jsou dány kmitočtem napájecího napětí odebíraného ze sítě a počtem pólů trojfázového motoru.
![n_s=\frac{60 \cdot\ f}{p}\quad[min^{-1}],](http://upload.wikimedia.org/wikipedia/cs/math/4/d/6/4d6ad72255f073362660309c28128d16.png)
kde  je kmitočet proudu a
je kmitočet proudu a  je počet pólových dvojic statoru.
je počet pólových dvojic statoru.
je kmitočet proudu a je počet pólových dvojic statoru.Při běžné pasivní zátěži se rotor nemůže otáčet stejnými (tj. synchronními) otáčkami jako magnetické pole statoru, pro generování momentu je potřeba, aby měl rotor jiné otáčky než stator. Při synchronních otáčkách by se rotor a magnetické pole vůči sobě nepohybovaly a tím by se v rotoru neindukovalo napětí a nevznikala by točivá síla. Míra rozdílu otáček pole a rotoru je nazývána skluz, udávána v procentech a definována jako:
![s=\frac{n_s-n}{n_s}\cdot 100\quad[%],](http://upload.wikimedia.org/wikipedia/cs/math/b/1/d/b1d77b776acdd13b1a15e002df0c8957.png)
kde  jsou otáčky magnetického pole statoru,
jsou otáčky magnetického pole statoru,  jsou otáčky rotoru. Podle hodnoty skluzu lze snadno rozdělit oblasti práce asynchronního stroje:
jsou otáčky rotoru. Podle hodnoty skluzu lze snadno rozdělit oblasti práce asynchronního stroje:
jsou otáčky magnetického pole statoru, jsou otáčky rotoru. Podle hodnoty skluzu lze snadno rozdělit oblasti práce asynchronního stroje: – generátor
– generátor – motor
– motor – brzda
– brzda

Točivé pole tvořené statorem má větší rychlost než otáčky rotoru
4. Spouštění
Při spouštěni asynchronního motoru je záběrový proud až 7 krát vyšší než hodnota nominálního proudu. Tím vznikají v síti velké proudové rázy při poměrně malém záběrovém momentu. Proto je přímé spouštění povoleno pouze pro motory s výkonem přibližně do 3 kW.
Motor s kotvou nakrátko
Zmenšení velkého rozběhového proudu lze u těchto typů motoru docílit pouze snížením rozběhového napětí. Nejčastěji používané metody jsou:
- Rotorový spouštěč - Do série s vinutím se zapojí omezovací odpory, které se během spouštění postupně vyřazují. Pro omezení tepelných ztrát v odporech se do obvodu zařazují předřadné cívky, které ovšem zhoršují účiník v síti. Tento způsob je vhodný pro jemný záběr motoru, který je při rozběhu málo zatížen.
- Rozběhové transformátory - Do spouštěcího obvodu připojené transformátory snižují rozběhové napětí a tím i rozběhový proud. Z ekonomických důvodů se nejčastěji používají autotransformátory. Při spouštění lze autotransformátor i přetížit, neboť ihned po rozběhnutí motoru je odpojen ze sítě. Tento způsob rozběhu se používá hlavně pro motory velkých výkonů.
- Přepínač hvězda - trojúhelník - Statorové svorky motoru jsou běžně spojeny do trojúhelníku, pokud při rozběhu přepneme svorky do hvězdy, napětí na vinutí se zmenší
 krát, tím klesne odebíraný proud a výkon na třetinu. Metoda se může používat jen při malém zatížení motoru.
krát, tím klesne odebíraný proud a výkon na třetinu. Metoda se může používat jen při malém zatížení motoru. - Polovodičový regulátor napětí - Jde o moderní postup, při kterém lze dosáhnout plynulý rozběh motoru, zlepšení účiníku a ještě šetřit elektrickou energií.
- Speciální úprava klece
- Kotvy s dvojitou klecí - jedna klec je nazývána rozběhová a druhá, umístěna blíže ke středu, je nazývána běhová.
- Odporová klec - klec vyrobená z materiálu s větším měrným odporem.
- Vírová kotva - speciální tvary drážek a tyčí vinutí jsou umístěny po celém obvodu rotoru, každý z těchto vodičů má stejný odpor, ale různé rozptylové indukčnosti.
Přes kartáče je ke sběracím kroužkům rotoru připojen rotorový spouštěč, sestaven ze tří stejně velkých odporů, které jsou postupně vyřazovány. Na konci rozběhu je vinutí spojeno nakrátko. Výhoda je, že motory mohou být při rozběhu zatížené.
5. Regulace otáček
Otáčky rotoru: ,
,
 , kmitočtem napájecího napětí
, kmitočtem napájecího napětí  , a počet pólů . Regulovat otáčky tedy můžeme změnou kterékoliv z těchto veličin.
, a počet pólů . Regulovat otáčky tedy můžeme změnou kterékoliv z těchto veličin.- Regulace změnou skluzu – změníme-li výkon, který se spotřebovává v rotoru, změní se i skluz. Lze použít pouze pro motor s kroužkovou kotvou.
- Pomocí regulačního odporu – zařazením odporu do obvodu rotoru se část skluzového výkonu přemění na teplo. Je to nehospodárný způsob změny skluzu.
- Podsynchronní kaskádou – část skluzového výkonu se vrací zpět do sítě, jde tedy o hospodárnější způsob snížení skluzu. Kmitočet rotorových proudů je odlišný od kmitočtu sítě, před navrácením výkonu do sítě se tedy musí použít měnič kmitočtu.
- Regulace změnou kmitočtu – používá se u motorů s kotvou nakrátko. Připojením měniče kmitočtu můžeme řídit napětí a tím i vytvářené magnetické pole statoru.
- Skalární řízení – lze nastavovat velikost magnetického toku. Používá se u motorů s malými nároky na dynamické vlastnosti (čerpadla,ventilátory)
- Vektorové řízení – kromě velikosti magnetického toku lze nastavovat i jeho směr a tím můžeme docílit plynulou změnu otáček při jakémkoliv režimu práce a zatížení. Jde o nejdokonalejší způsob řízení otáček a lze jím docílit i otáček nadsynchronních.
- Regulace změnou počtu pólů – lze dosáhnout pouze skokové změny otáček, protože počet pólových dvojic musí být celé číslo.
- Regulace změnou napětí - je založena na změně tvaru momentové charakteristiky se změnou napětí s následným posunutím pracovního bodu.
Při prostém odpojení ze sítě je v motoru (a případně v dalších zařízeních poháněných motorem (například vlak)) akumulována velká kinetická energie, která působí dlouhý doběh motoru. Brzdný moment, potřebný k rychlejšímu zastavení motoru, lze vytvořit jak mechanicky, tak i elektronicky.
- Brzdění protiproudem – změněním smyslu otáčení magnetického pole statoru se vytváří brzdný moment, působící proti směru otáčení rotoru. Po dosažení nulových otáček je nutno motor odpojit, aby se nezačal otáčet opačným směrem. Veškerá kinetická energie se mění na teplo, tento způsob je tedy značně nehospodárný. Tento způsob připadá v úvahu pouze pro velmi malé výkony, skokovým přepnutím smyslu otáčení motoru totiž vznikne skluz o velikosti dvojnásobku nominální frekvence motoru a tím dojde k obrovskému přetížení motoru a nárůstu proudu. Tento způsob není moc vhodný, protože veškeré teplo vytvořené brzděním zůstává v motoru, který se tím ohřívá.
- Brzdění generátorické – (Elektrodynamická brzda) nastává při práci motoru jako generátoru, tedy když
 lze jej použít pro zastavení motoru, pouze pokud je možné měnit frekvenci otáčení magnetického pole frekvenčním měničem. Pokud je možné vracet vyrobenou energii zpátky do sítě, jedná se o nejhospodárnější způsob brzdění asynchronního motoru (tzv. Rekuperace). Tento způsob používají například moderní lokomotivy, tramvaje a trolejbusy. Pokud frekvenční měnič nevrací vyrobenou elektřinu zpátky do sítě, musí se tato někde spálit, nejčastěji v odporníku. Tento druhý způsob používají starší lokomotivy, tramvaje a trolejbusy. U obou těchto způsobů je výhodné, že se vyrobená energie odvede mimo motor, který se díky tomu zbytečně nepřehřívá. Pomocí tohoto způsobu lze zastavit motor až do nulových otáček, udržovat konstantní brzdící moment a podobně.
lze jej použít pro zastavení motoru, pouze pokud je možné měnit frekvenci otáčení magnetického pole frekvenčním měničem. Pokud je možné vracet vyrobenou energii zpátky do sítě, jedná se o nejhospodárnější způsob brzdění asynchronního motoru (tzv. Rekuperace). Tento způsob používají například moderní lokomotivy, tramvaje a trolejbusy. Pokud frekvenční měnič nevrací vyrobenou elektřinu zpátky do sítě, musí se tato někde spálit, nejčastěji v odporníku. Tento druhý způsob používají starší lokomotivy, tramvaje a trolejbusy. U obou těchto způsobů je výhodné, že se vyrobená energie odvede mimo motor, který se díky tomu zbytečně nepřehřívá. Pomocí tohoto způsobu lze zastavit motor až do nulových otáček, udržovat konstantní brzdící moment a podobně. - Dynamické brzdění – (Stejnosměrná brzda) statorové vinutí se odpojí od sítě a připojí se na zdroj stejnosměrného napětí. Magnetické pole statoru je tedy nepohyblivé a pohybující se rotor sám vytváří brzdný moment. Velikost brzdného momentu je možno regulovat velikostí stejnosměrného proudu pouze v omezeném rozsahu. Tento způsob není moc účinný při vyšších otáčkách. A při otáčkách blízkých nule se musí motor dobrzdit mechanicky. (pro běžný čtyřpólový asynchronní motor je SS brzda nejúčinnější asi od 10Hz do 1Hz) Tento způsob brzdění není moc výhodný, protože veškeré teplo vytvořené brzděním zůstává v motoru, který se tím ohřívá.
7. Vlastnosti
- otáčky
- točivý moment
- účinnost
- regulovatelnost
- jednoduchá konstrukce
- vysoký stupeň krytí
- standardizovaná velikost
- konstrukce
- štítkové údaje
Na štítku asynchronního motoru se uvádějí jmenovité hodnoty důležitých provozních veličin. Jmenovitá hodnota veličiny je taková hodnota, se kterou může být stroj provozován trvale, aniž by došlo k jeho zničení nebo poškození. Jmenovitá hodnota se značí indexem n u symbolu dané veličiny. Na štítku asynchronního motoru se zpravidla udává typ, výrobce, rok výroby, hmotnost, krytí, třída izolace a výrobní číslo. Pro provoz motoru mají však význam především štítkové hodnoty výkonu, otáček, zapojení svorkovnice, napětí, proudu, frekvence a účiníku. U třífázových motorů se na štítku uvádí sdružené napětí. U motorů s kotvou vinutou se navíc uvádí hodnoty rotorového proudu a napětí. Ze štítkových hodnot lze určit další veličiny motoru - otáčky naprázdno, jmenovitý skluz, jmenovitý moment, jmenovitý příkon, jmenovité ztráty a jmenovitou účinnost.
9. Pracovní režimy
- pohon
- pohon se stejnosměrnou brzdou
- rekuperace
- pod jakou zatížitelností bude trvale pracovat
10. Jednofázový asynchronní motor
Konstrukce
- Stator – je složen ze statorových plechů a dvojího vinutí. Hlavní vinutí je ve 2/3 drážek a pomocné vinutí je ve zbývající 1/3.
- Rotor – je vždy klecového provedení.
 Aby rotor vytvářel točivý moment, musí se magnetické pole statoru vůči rotoru pohybovat. Při jednofázovém napájení se tedy musí proudy v hlavním a pomocném vinutí fázově posunout, aby vzniklo točivé magnetické pole. To se dociluje zapojením kondenzátoru, činného odporu nebo zvýšenou indukčností pomocného vinutí. Fázový posun mezi proudy bývá 90°. Působení pomocného vinutí není pro samotný běh motoru nutné, a tak se po rozběhu odpojuje. Nejčastější způsob odpínání pomocného vinutí je odstředivým spínačem. Bylo zjištěno, že pokud zůstane pomocné vinutí s kondenzátorem zapojeno i po rozběhu motoru, zvýší se točivý moment motoru o cca 10% a zlepší se účiník.
Aby rotor vytvářel točivý moment, musí se magnetické pole statoru vůči rotoru pohybovat. Při jednofázovém napájení se tedy musí proudy v hlavním a pomocném vinutí fázově posunout, aby vzniklo točivé magnetické pole. To se dociluje zapojením kondenzátoru, činného odporu nebo zvýšenou indukčností pomocného vinutí. Fázový posun mezi proudy bývá 90°. Působení pomocného vinutí není pro samotný běh motoru nutné, a tak se po rozběhu odpojuje. Nejčastější způsob odpínání pomocného vinutí je odstředivým spínačem. Bylo zjištěno, že pokud zůstane pomocné vinutí s kondenzátorem zapojeno i po rozběhu motoru, zvýší se točivý moment motoru o cca 10% a zlepší se účiník.Vinutí statoru jednofázového asynchronního motoru.
U1-U2: hlavní vinutí, Z1-Z2: pomocné vinutí
U1-U2: hlavní vinutí, Z1-Z2: pomocné vinutí
Použití
Používá se pro elektrické pohony malých výkonů, přibližně max. do 2 kW, neboť ve veřejných sítích není vhodné ani technicky přípustně přílišné jednofázové zatížení. Tento typ motoru se využívá především tam, kde není nutné regulovat otáčky motoru během provozu stroje např. při pohonu kompresorů v lednicích. Regulace otáček pomocí frekvenčních měničů je nejen stále provozně drahá, ale bývá i zdrojem nežádoucího elektromagnetického rušení. V běžných domácích pračkách, sekačkách, ventilátorech, elektrickém ručním nářadí, kuchyňských robotech, vysavačích, vysoušečích vlasů právě z tohoto důvodu stále prozatím spíše převažují klasické komutátorové motory.
Pro zařízení s vyšším výkonem je tedy nutno použít sdružené třífázové napětí a klasický třífázový asynchronní motor.
Žádné komentáře:
Okomentovat